Introduction
Introduction to MDPs and RL
Shortest Path
Finding the shortest path:
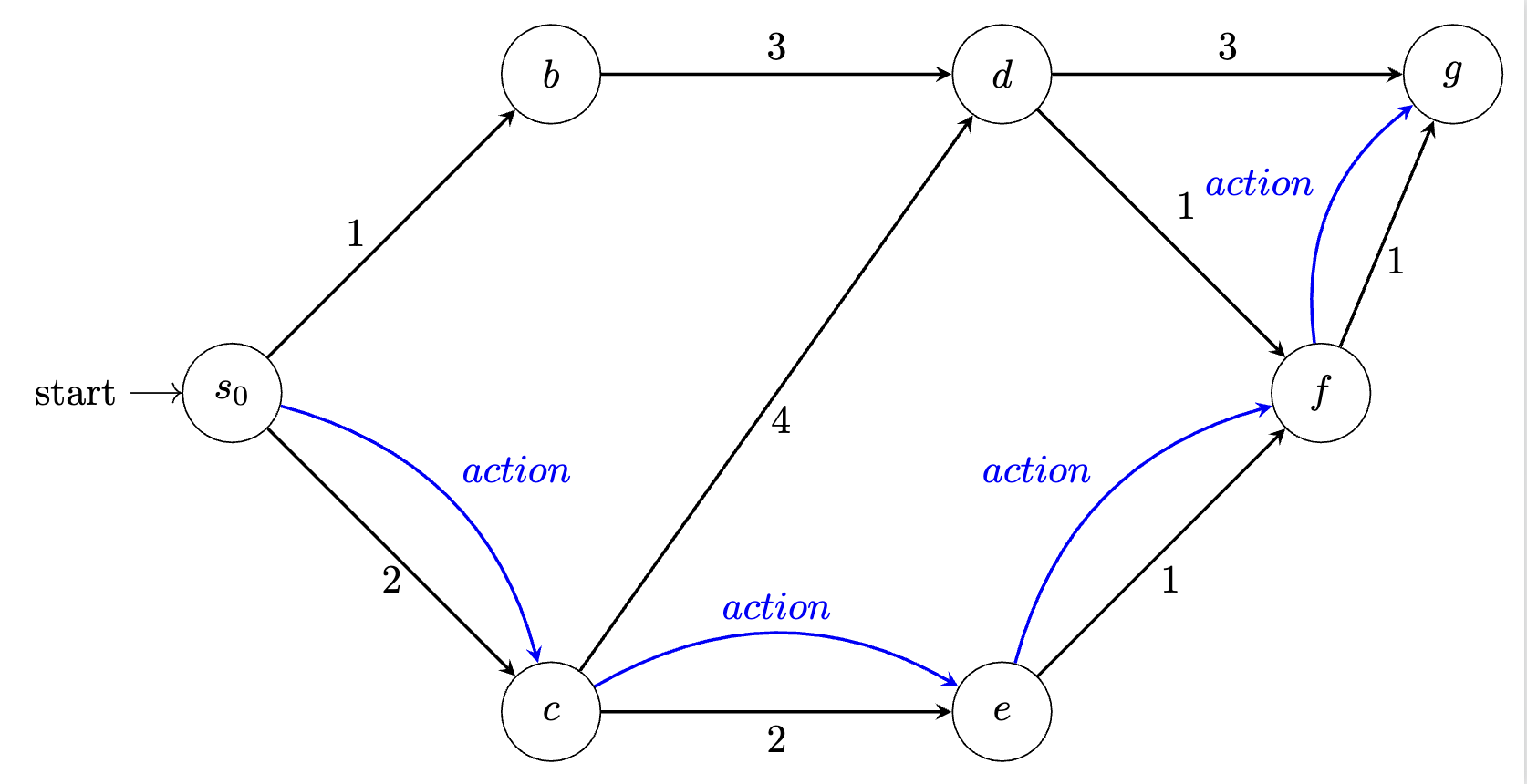
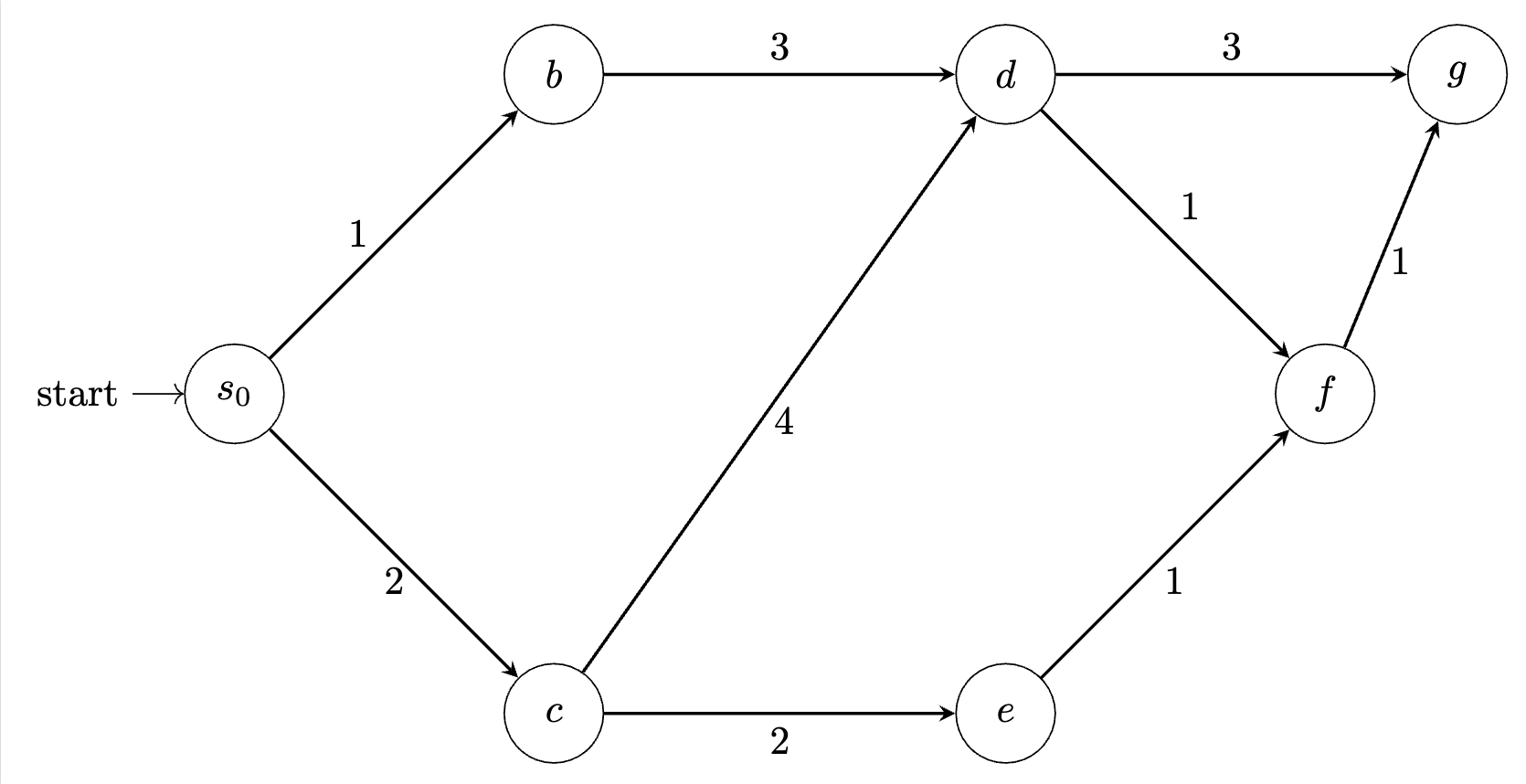
Where we have a graph \(G = (V, E)\) where \(V\) are the vertices and \(E\) are the edges with weights \(w\). The vertices are the \(\textbf{states}\) and the edges are the \(\textbf{actions}\). Tne goal is you have a starting state and you wanna reach the end state while attating the least cost of the wieghts \(w\) along the edges. If the startegy is \(\textbf{Greedy}\) then it is suboptimal due to dealyed affects of long term decisions. There must be a better way to long-term planning.
Based on actions taken by the agent